scene_synthesizer.procedural_assets.CabinetAsset
- class scene_synthesizer.procedural_assets.CabinetAsset(*args, **kwargs)
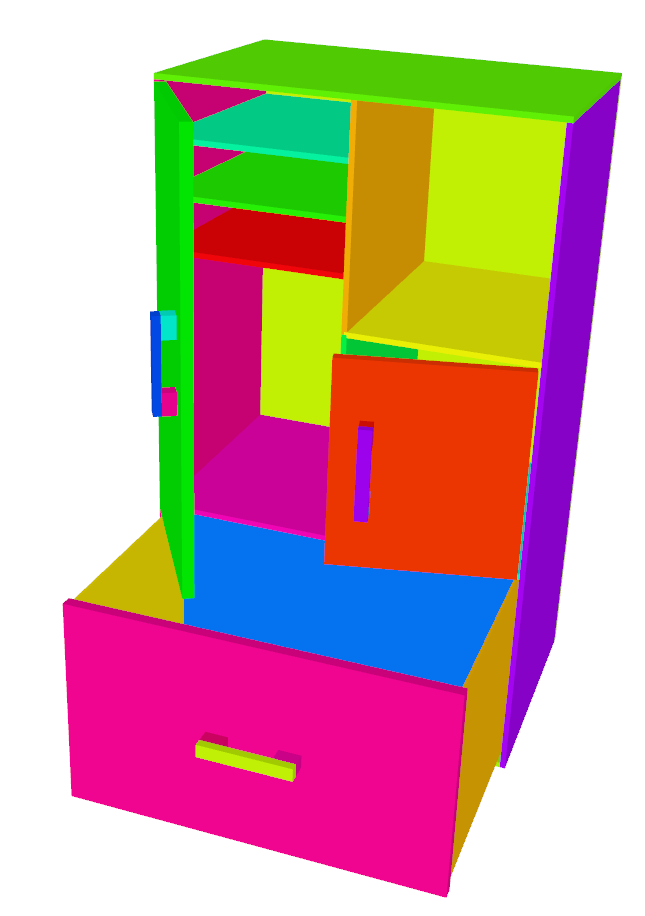
A cabinet.
- Parameters:
width (float) – Width of the cabinet or None. If None compartment_widths are used as absolute sizes otherwise relative ones.
depth (float) – Depth of the cabinet (excluding possible handles).
height (float) – Height of the cabinet or None. If None compartment_heights are used as absolute sizes otherwise relative ones.
compartment_mask (list[list[int]] or np.ndarray) – A 2D matrix of type int which represents the segmentation map of the cabinet layout. Same numbers indicate same compartment.
compartment_types (list[str]) – A list of strings of [“none”, “open”, “closed”, “door_left”, “door_right”, “door_top”, “door_bottom”, “drawer”] depending on the type of the i-th compartment (i being the entry in the compartment_mask).
compartment_interior_masks (dict[list[list[int]] or dict[np.ndarray], optional) – A dictionary of compartment masks that represent the internal structure of a single compartment (e.g. multiple shelves behind a door). The dictionary key is the entry to the compartment_mask. Defaults to None.
outer_wall_thickness (float, optional) – Thickness of outer walls of the cabinet. Defaults to 0.01.
inner_wall_thickness (float, optional) – Thickness of inner walls and surfaces of the cabinet.
drawer_wall_thickness (float, optional) – Thickness of drawer walls and surfaces.
frontboard_thickness (float, optional) – Thickness of front boards.
frontboard_overlap (float, optional) – Overlap of front boards with outer and inner walls, between 0 (no overlap) and 1 (maximum overlap). Defaults to 0.0.
compartment_widths (list[float], optional) – List of widths of compartment columns. Must have as many elements as compartment_mask has columns. If None all columns have equal width that sum to width. Is considered relative if width is defined. Defaults to None.
compartment_heights (list[float], optional) – List of heights of compartment rows. Must have as many elements as compartment_mask has rows. If None all rows have equal heights that sum to height. Is considered relative if height is defined. Defaults to None.
handle_width (float, optional) – Defaults to 0.1682.
handle_height (float, optional) – Defaults to 0.038.
handle_depth (float, optional) – Defaults to 0.024.
handle_offset (tupe(float, float), optional) – Defaults to None.
handle_shape_args (dict, optional) – Arguments for procedural handles. If None, will create handle made out of boxes. Defaults to None.
door_shape_args (dict, optional) – Arguments for procedural door moldings. If None, will create box-shaped door. Defaults to None.
**kwargs – Keyword argument passed onto the URDFAsset constructor.
- Raises:
ValueError – If neither width nor compartment_widths is defined.
ValueError – If neither height nor compartment_heights is defined.
ValueError – If compartment type is unknown.
- as_trimesh_scene(namespace='object', use_collision_geometry=True)
- compute_stable_poses(convexify=False, center_mass=None, sigma=0.0, n_samples=1, threshold=0.0, tolerance_zero_extent=1e-6, use_collision_geometry=True)
Wrapper for trimesh.poses.compute_stable_poses function.
- Parameters:
convexify (bool, optional) – Whether to use the convex hull of the object.
center_mass ((3,) float, optional) – The object center of mass. If None, this method assumes uniform density and watertightness and computes a center of mass explicitly. Defaults to None.
sigma (float, optional) – The covariance for the multivariate gaussian used to sample center of mass locations. Defaults to 0.0.
n_samples (int, optional) – The number of samples of the center of mass location. Defaults to 1.
threshold (float, optional) – The probability value at which to threshold returned stable poses. Defaults to 0.0.
tolerance_zero_extent (float, optional) – The threshold for considering a dimension to have zero length. In this case, trimesh.poses.compute_stable_poses gets caught in an infinite loop. We avoid this by specifying the stable poses to be along zero-length dimensions. Defaults to 1e-6.
use_collision_geometry (bool, optional) – Whether to use the collision geometry or visual geometry to calculate stable poses. Defaults to True.
- Returns:
The homogeneous matrices that transform the object to rest in a stable pose. probs ((n,) float): Probability in (0, 1) for each pose
- Return type:
transforms ((n, 4, 4) float)
- get_bounds(query=None, frame=None, use_collision_geometry=None)
Return bounds of asset defined through nodes selected by query.
- Parameters:
query (list[str] or str) – A list, string, or regular expression referring to a subset of all geometry of this asset. None means entire asset. Defaults to None.
frame (str, optional) – The reference frame to use. None means asset’s base frame is used. Defaults to None.
use_collision_geometry (bool, optional) – Whether to use collision geometry, visual geometry or both (if None). Defaults to None.
- Returns:
A 2x3 matrix of minimum and maximum coordinates for each dimension.
- Return type:
np.ndarray
- get_center_mass(query=None, frame=None, use_collision_geometry=None)
Return center of mass for subscene defined through nodes selected by query.
- Parameters:
query (list[str] or str) – A list, string, or regular expression referring to a subset of all geometry of this asset. None means entire asset. Defaults to None.
frame (str, optional) – The reference frame to use. None means asset’s base frame is used. Defaults to None.
use_collision_geometry (bool, optional) – Whether to use collision geometry, visual geometry or both (if None). Defaults to None.
- Returns:
A 3-vector describing the center of mass of the queried subscene.
- Return type:
np.ndarray
- get_centroid(query=None, frame=None, use_collision_geometry=None)
Return centroid for asset defined through nodes selected by query.
- Parameters:
query (list[str] or str) – A list, string, or regular expression referring to a subset of all geometry of this asset. None means entire asset. Defaults to None.
frame (str, optional) – The reference frame to use. None means asset’s base frame is used. Defaults to None.
use_collision_geometry (bool, optional) – Whether to use collision geometry, visual geometry or both (if None). Defaults to None.
- Returns:
A 3-vector describing the centroid of the queried subscene.
- Return type:
np.ndarray
- get_extents(query=None, frame=None, use_collision_geometry=None)
Return extents of asset defined through nodes selected by query.
- Parameters:
query (list[str] or str) – A list, string, or regular expression referring to a subset of all geometry of this asset. None means entire asset. Defaults to None.
frame (str, optional) – The reference frame to use. None means asset’s base frame is used. Defaults to None.
use_collision_geometry (bool, optional) – Whether to use collision geometry, visual geometry or both (if None). Defaults to None.
- Returns:
A 3-vector describing the extents of each dimension.
- Return type:
np.ndarray
- get_reference_frame(xyz, query=None, frame=None, use_collision_geometry=None)
Return reference frame for subscene defined through nodes selected by query.
- Parameters:
xyz (tuple[str]) – A 3-tuple/list of [‘top’, ‘center’, ‘bottom’, ‘com’, ‘centroid’]
query (list[str] or str) – A list, string, or regular expression referring to a subset of all geometry of this asset. None means entire asset. Defaults to None.
frame (str, optional) – The reference frame to use. None means scene’s base frame is used. Defaults to None.
use_collision_geometry (bool, optional) – Whether to use collision geometry, visual geometry or both (if None). Defaults to None.
- Raises:
ValueError – Unknown reference string.
- Returns:
A 4x4 homogenous matrix.
- Return type:
np.ndarray
- mesh(use_collision_geometry=False)
Return a trimesh.Trimesh object of the asset.
- Parameters:
use_collision_geometry (bool, optional) – Whether to use the collision or visual geometry or both. Defaults to False.
- Returns:
A trimesh mesh.
- Return type:
trimesh.Trimesh
- sample_stable_pose(seed=None, **kwargs)
Return a stable pose according to their likelihood.
- Returns:
homogeneous 4x4 matrix seed (int, numpy.random._generator.Generator, optional): A seed or random number generator. Defaults to None which creates a new default random number generator.
- Return type:
np.ndarray
- scene(obj_id='object', **kwargs)
Return a scene consisting of only this asset.
- Parameters:
obj_id (str, optional) – Name of object in scene. Defaults to ‘object’.
**kwargs – Additional keyword arguments that will be piped to the add_object method.
- Returns:
A scene
- Return type:
- show(use_collision_geometry=False, layers=None)
Display the asset via the trimesh scene viewer.
- Parameters:
use_collision_geometry (bool, optional) – Which geometry to show: visual or collision geometry. Defaults to False.
layers (list[str], optional) – Filter to show only certain layers, e.g. ‘visual’ or ‘collision’. Defaults to None, showing everything.