Articulations
Many procedural assets in scene_synthesizer are articulated, i.e., they contain revolute or prismatic joints that connect links.
File-based assets such as URDF, MJCF, or USDs also are able to represent articulations.
There are a number of methods that can give information about joints in the scene or set their properties:
from scene_synthesizer import procedural_scenes as ps
kitchen = ps.kitchen_island()
kitchen.is_articulated()
# True
kitchen.get_joint_names()
#
# Notice that this only returns the joints
# that are not fixed or floating joints
# To include them, use the argument
# include_fixed_floating_joints=True
#
# Note, that joint names are also - like
# geometries - namespaced. The prefix indicates
# which object the joint belongs to.
#
# ['base_cabinet/corpus_to_door_0_1',
# 'base_cabinet/corpus_to_door_1_1',
# 'base_cabinet/corpus_to_door_2_1',
# 'base_cabinet/corpus_to_drawer_0_0',
# 'dishwasher/corpus_to_door_0_1',
# 'kitchen_island/corpus_to_door_0_1',
# 'kitchen_island/corpus_to_door_1_1',
# 'kitchen_island/corpus_to_drawer_0_0',
# 'kitchen_island/corpus_to_drawer_1_0',
# 'range/corpus_to_door_0_1',
# 'range/corpus_to_drawer_0_2',
# 'refrigerator/door_joint',
# 'refrigerator/freezer_door_joint',
# 'sink_cabinet/corpus_to_door_0_1',
# 'sink_cabinet/corpus_to_door_1_1',
# 'wall_cabinet/corpus_to_door_0_0',
# 'wall_cabinet/corpus_to_door_1_0',
# 'wall_cabinet_0/corpus_to_door_0_0',
# 'wall_cabinet_0/corpus_to_door_1_0',
# 'wall_cabinet_1/corpus_to_door_0_0',
# 'wall_cabinet_1/corpus_to_door_1_0',
# 'wall_cabinet_2/corpus_to_door_0_0',
# 'wall_cabinet_3/corpus_to_door_0_0']
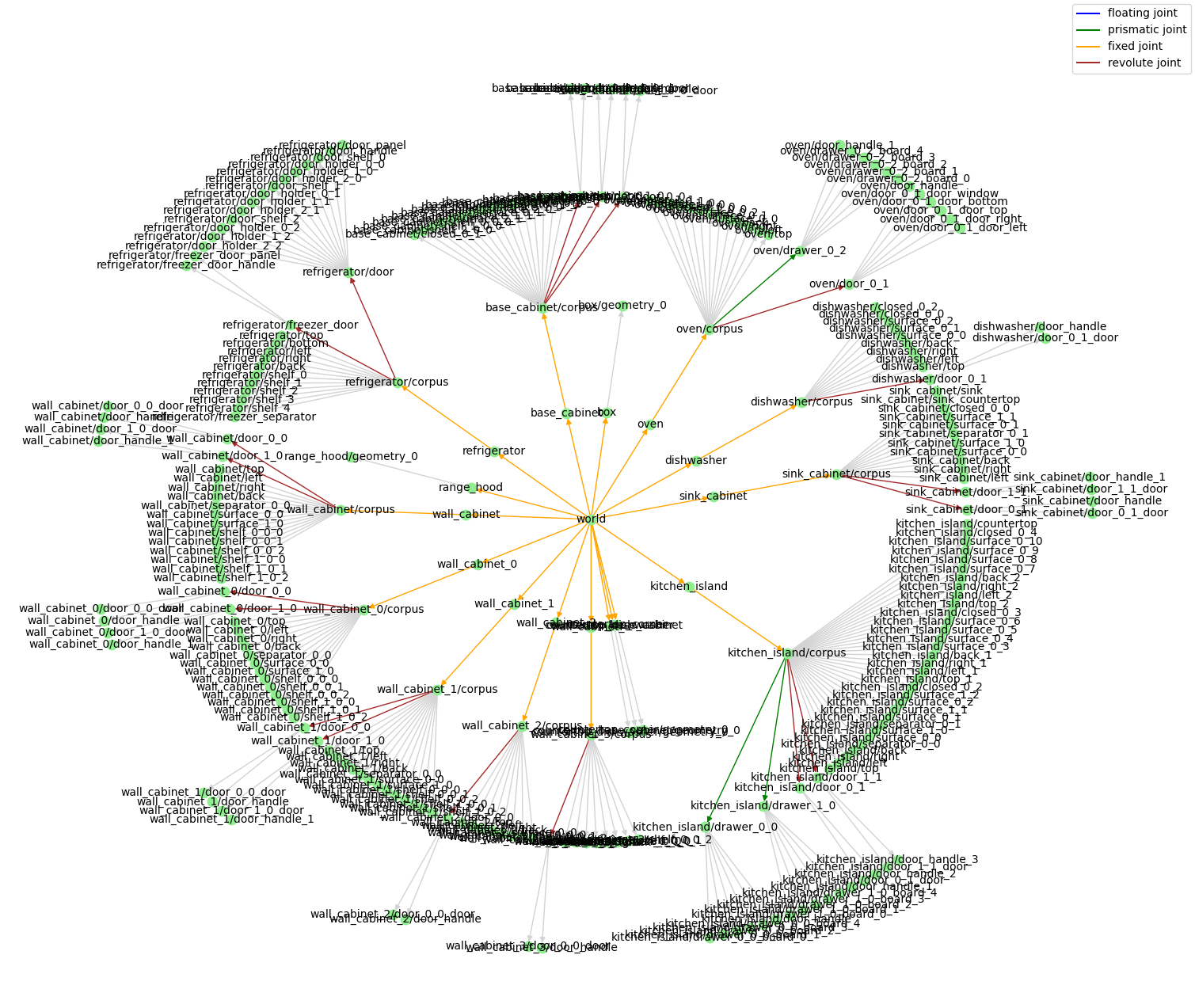
kitchen.show_graph()
#
# Draws a scene graph in which edges are colored
# according to the type of joint constraint (see below)
kitchen.get_joint_properties('refrigerator/door_joint')
#
# Returns a dict where the key is the name of the joint
# and the value is another dictionary with various
# properties such as the current configuration value,
# type of joint, joint limits, and axis.
#
# {'refrigerator/door_joint':
# {'name': 'refrigerator/door_joint',
# 'type': 'revolute',
# 'q': 0.0,
# 'axis': [-0.0, -0.0, -1.0],
# 'origin': [[1.0, 0.0, 0.0, -0.42765515409850885],
# [0.0, 1.0, 0.0, -0.32041050696103557],
# [0.0, 0.0, 1.0, 0.0],
# [0.0, 0.0, 0.0, 1.0]],
# 'limit_velocity': 100.0,
# 'limit_effort': 100.0,
# 'limit_lower': 0,
# 'limit_upper': 3.141592653589793}}
kitchen.get_configuration()
#
# Get the current configuration of the scene
# which is a concatenation of the individual
# object's configurations. It's also possible
# to query specific joints or objects.
#
# array([0., 0., 0., 0., 0., 0., 0., 0., 0., 0.,
# 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.,
# 0., 0.])
kitchen.get_joint_limits()
#
# Get the joint limits of all joints
# in the scene, i.e. a DOF x 2 matrix.
#
# array([[0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 0.61394479],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 0.2754 ],
# [0. , 0.2754 ],
# [0. , 1.57079633],
# [0. , 0.61394479],
# [0. , 3.14159265],
# [0. , 3.14159265],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633],
# [0. , 1.57079633]])
# Randomize all joint configurations within their limits
kitchen.random_configurations()
kitchen.colorize().show()
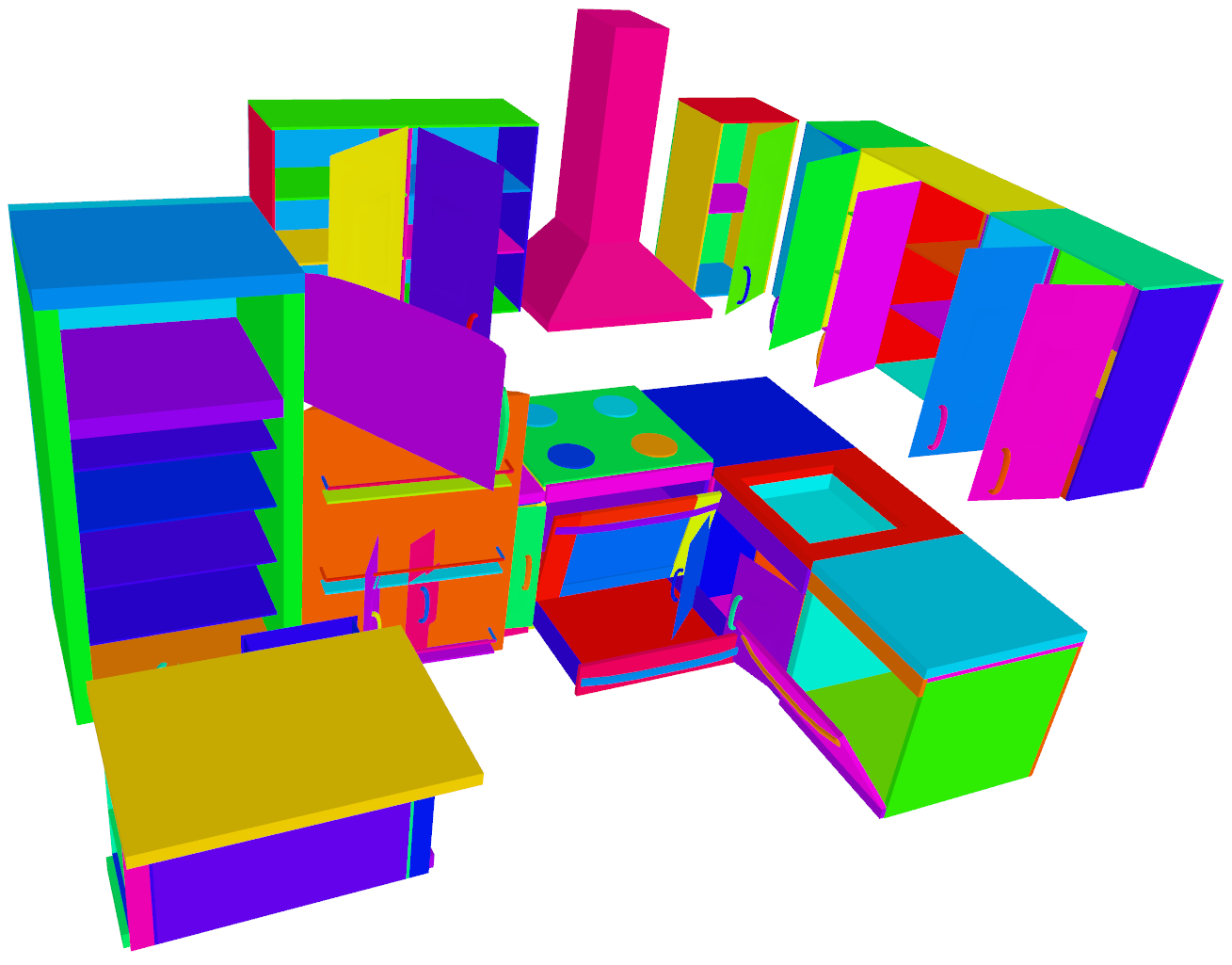
Note, that the method random_configurations() does not check for collisions.
In this example it can be seen that some open doors intersect with each other.
To circumvent this problem, one can simply sample until a collision-free configuration is found:
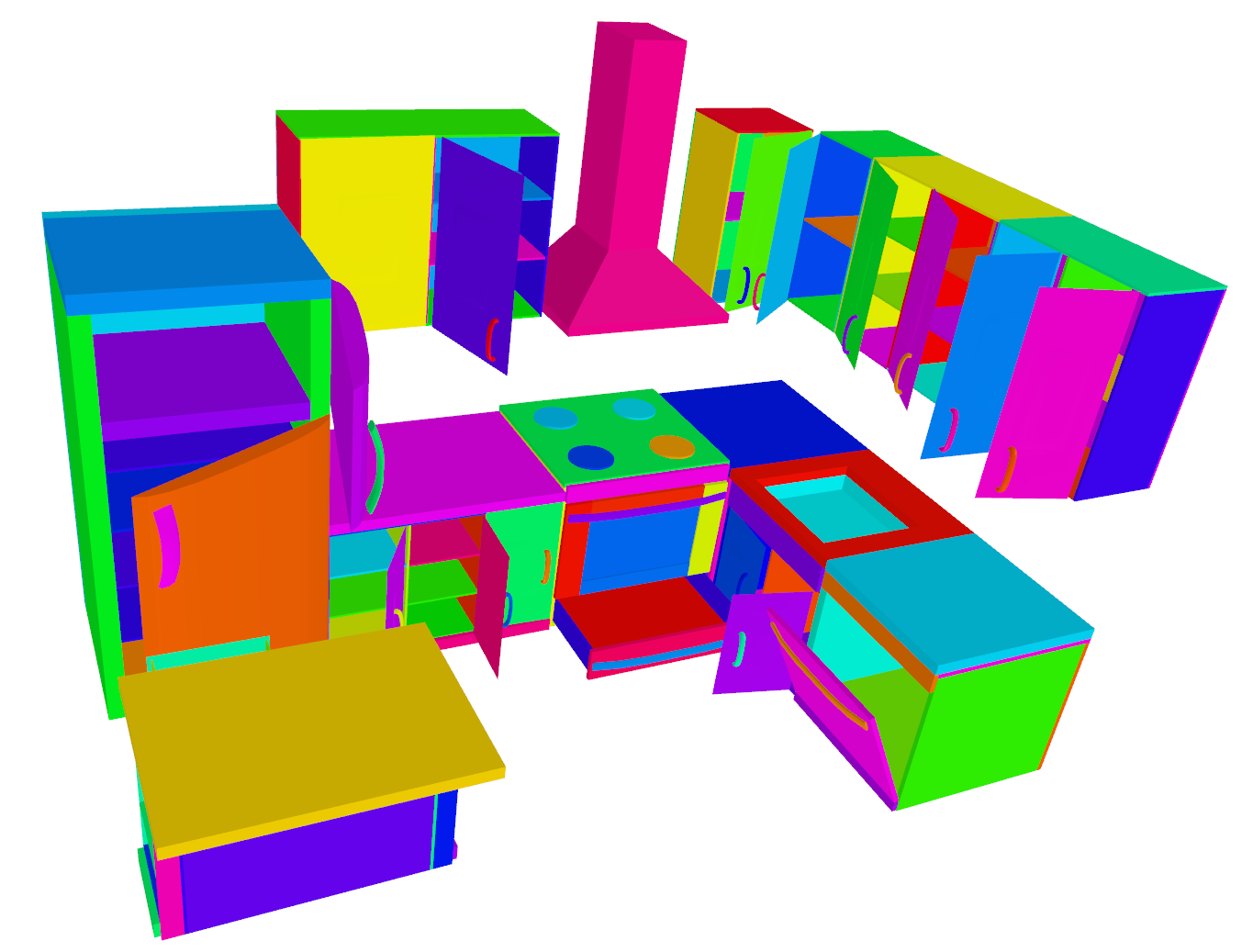
# set all joints back to their home configurations
kitchen.zero_configurations()
# iterate through all joints of the scene individually
for j in kitchen.get_joint_names():
# retrieve the joint's limits
limits = kitchen.get_joint_limits(joint_ids=[j])[0]
# sample a new joint configuratino until collision-free
while True:
kitchen.update_configuration(
joint_ids=[j],
configuration=[np.random.uniform(low=limits[0], high=limits[1])]
)
if not kitchen.in_collision(
ignore_object_self_collisions=True,
ignore_penetration_depth=0.005
):
break
kitchen.show()
Another important distinction to understand is the difference between a ‘fixed’, ‘floating’, and no joint. They mostly matter when exporting the scene and using it in a physics simulation. A ‘floating’ joint will create a dynamic rigid body (of the subtree in the scene graph), whereas no joint results in a static rigid object with infinite mass/inertia. An articulated object needs to be connected either with a ‘fixed’ or ‘floating’ joint, depending on whether one wants to simulate an articulation with a fixed or floating base.